若该文为原创文章,转载请注明原文出处。
前面提及目标跟踪使用的方法有很多,更多的是Deepsort方法。
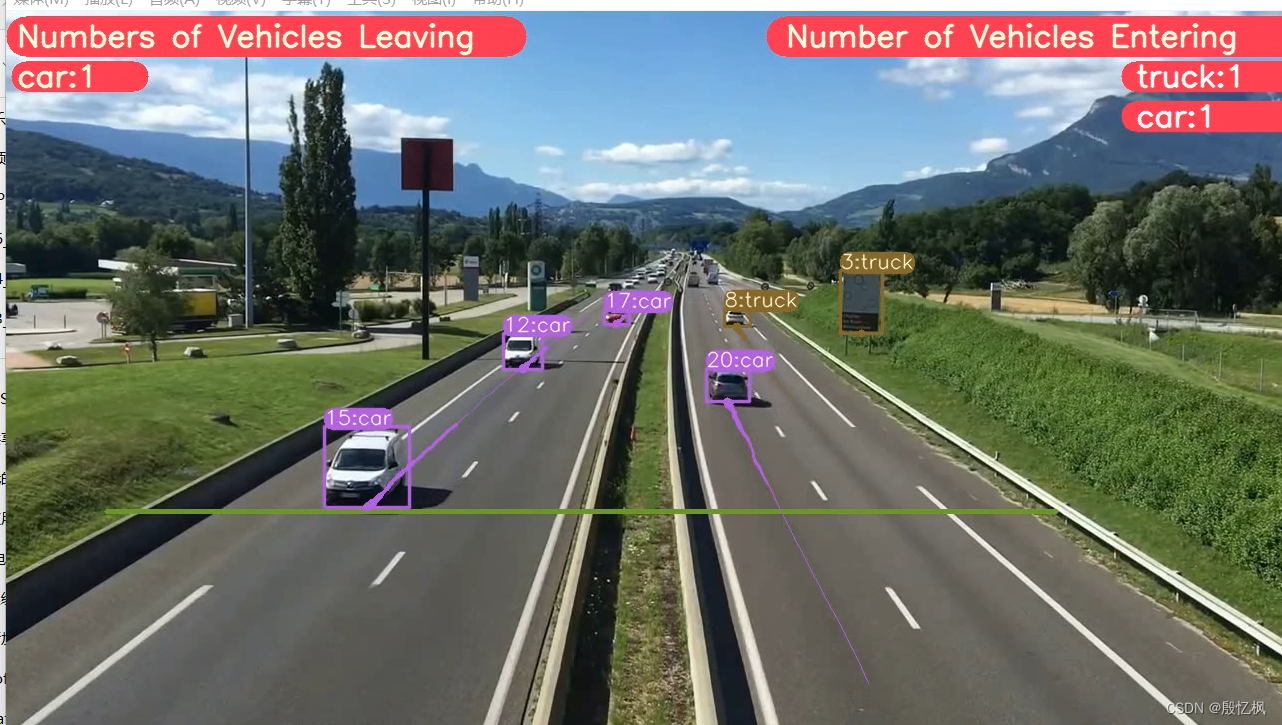
本篇博客记录YOLOv8的实例分割+deepsort视觉跟踪算法。结合YOLOv8的目标检测分割和deepsort的特征跟踪,该算法在复杂环境下确保了目标的准确与稳定跟踪。在计算机视觉中,这种跟踪技术在安全监控、无人驾驶等领域有着广泛应用。
源码地址:GitHub - MuhammadMoinFaisal/YOLOv8_Segmentation_DeepSORT_Object_Tracking: YOLOv8 Segmentation with DeepSORT Object Tracking (ID + Trails)
感谢Muhammad Moin
一、环境搭建教程
使用的是Anaconda3,环境自行安装,可以参考前面的文章搭建。
1、创建虚拟环境
conda create -n YOLOv8-Seg-Deepsort python=3.8
2、激活
conda activate YOLOv8-Seg-Deepsort二、下载代码
代码可以使用源码,也可以使用我的,我把YOLOv8_Segmentation_DeepSORT_Object_Tracking和YOLOv8-DeepSORT-Object-Tracking整合在一起了。
下载地址:
Yinyifeng18/YOLOv8_Segmentation_DeepSORT_Object_Tracking (github.com)
git clone https://github.com/Yinyifeng18/YOLOv8_Segmentation_DeepSORT_Object_Tracking.git三、、安装依赖项
pip install -e ".[dev]"如果使用的是源码,会出现下面错误:
AttributeError: module 'numpy' has no attribute 'float'
Set the environment variable HYDRA_FULL_ERROR=1 for a complete stack trace.
出错错误的原因是所用的代码是依赖于旧版本的Numpy。您可以将你的Numpy版本降级到1.23.5。
pip install numpy==1.23.5
四、测试
1、转到检测或分割目录下
cd YOLOv8_Segmentation_DeepSORT_Object_Tracking\ultralytics\yolo\v8\detect
或
cd YOLOv8_Segmentation_DeepSORT_Object_Tracking\ultralytics\yolo\v8\segment2、测试
python predict.py model=yolov8l.pt source="test3.mp4" show=True或
python predict.py model=yolov8x-seg.pt source="test3.mp4" show=True使用是实例分割测试,运行结果。
如果想保存视频,直接参数save=True

五、代码説明
DeepSort需要DeepSORT 文件,下载地址是:
https://drive.google.com/drive/folders/1kna8eWGrSfzaR6DtNJ8_GchGgPMv3VC8?usp=sharing-
下载DeepSORT Zip文件后,将其解压缩到子文件夹中,然后将deep_sort_pytorch文件夹放入ultralytics/yolo/v8/segment文件夹中
-
目录结果如下

这里直接附predict.py代码
# Ultralytics YOLO 🚀, GPL-3.0 license
import hydra
import torch
from ultralytics.yolo.utils import DEFAULT_CONFIG, ROOT, ops
from ultralytics.yolo.utils.checks import check_imgsz
from ultralytics.yolo.utils.plotting import colors, save_one_box
from ultralytics.yolo.v8.detect.predict import DetectionPredictor
from numpy import random
import cv2
from deep_sort_pytorch.utils.parser import get_config
from deep_sort_pytorch.deep_sort import DeepSort
#Deque is basically a double ended queue in python, we prefer deque over list when we need to perform insertion or pop up operations
#at the same time
from collections import deque
import numpy as np
palette = (2 ** 11 - 1, 2 ** 15 - 1, 2 ** 20 - 1)
data_deque = {}
deepsort = None
object_counter = {}
object_counter1 = {}
line = [(100, 500), (1050, 500)]
def init_tracker():
global deepsort
cfg_deep = get_config()
cfg_deep.merge_from_file("deep_sort_pytorch/configs/deep_sort.yaml")
deepsort= DeepSort(cfg_deep.DEEPSORT.REID_CKPT,
max_dist=cfg_deep.DEEPSORT.MAX_DIST, min_confidence=cfg_deep.DEEPSORT.MIN_CONFIDENCE,
nms_max_overlap=cfg_deep.DEEPSORT.NMS_MAX_OVERLAP, max_iou_distance=cfg_deep.DEEPSORT.MAX_IOU_DISTANCE,
max_age=cfg_deep.DEEPSORT.MAX_AGE, n_init=cfg_deep.DEEPSORT.N_INIT, nn_budget=cfg_deep.DEEPSORT.NN_BUDGET,
use_cuda=True)
##########################################################################################
def xyxy_to_xywh(*xyxy):
"""" Calculates the relative bounding box from absolute pixel values. """
bbox_left = min([xyxy[0].item(), xyxy[2].item()])
bbox_top = min([xyxy[1].item(), xyxy[3].item()])
bbox_w = abs(xyxy[0].item() - xyxy[2].item())
bbox_h = abs(xyxy[1].item() - xyxy[3].item())
x_c = (bbox_left + bbox_w / 2)
y_c = (bbox_top + bbox_h / 2)
w = bbox_w
h = bbox_h
return x_c, y_c, w, h
def xyxy_to_tlwh(bbox_xyxy):
tlwh_bboxs = []
for i, box in enumerate(bbox_xyxy):
x1, y1, x2, y2 = [int(i) for i in box]
top = x1
left = y1
w = int(x2 - x1)
h = int(y2 - y1)
tlwh_obj = [top, left, w, h]
tlwh_bboxs.append(tlwh_obj)
return tlwh_bboxs
def compute_color_for_labels(label):
"""
Simple function that adds fixed color depending on the class
"""
if label == 0: #person
color = (85,45,255)
elif label == 2: # Car
color = (222,82,175)
elif label == 3: # Motobike
color = (0, 204, 255)
elif label == 5: # Bus
color = (0, 149, 255)
else:
color = [int((p * (label ** 2 - label + 1)) % 255) for p in palette]
return tuple(color)
def draw_border(img, pt1, pt2, color, thickness, r, d):
x1,y1 = pt1
x2,y2 = pt2
# Top left
cv2.line(img, (x1 + r, y1), (x1 + r + d, y1), color, thickness)
cv2.line(img, (x1, y1 + r), (x1, y1 + r + d), color, thickness)
cv2.ellipse(img, (x1 + r, y1 + r), (r, r), 180, 0, 90, color, thickness)
# Top right
cv2.line(img, (x2 - r, y1), (x2 - r - d, y1), color, thickness)
cv2.line(img, (x2, y1 + r), (x2, y1 + r + d), color, thickness)
cv2.ellipse(img, (x2 - r, y1 + r), (r, r), 270, 0, 90, color, thickness)
# Bottom left
cv2.line(img, (x1 + r, y2), (x1 + r + d, y2), color, thickness)
cv2.line(img, (x1, y2 - r), (x1, y2 - r - d), color, thickness)
cv2.ellipse(img, (x1 + r, y2 - r), (r, r), 90, 0, 90, color, thickness)
# Bottom right
cv2.line(img, (x2 - r, y2), (x2 - r - d, y2), color, thickness)
cv2.line(img, (x2, y2 - r), (x2, y2 - r - d), color, thickness)
cv2.ellipse(img, (x2 - r, y2 - r), (r, r), 0, 0, 90, color, thickness)
cv2.rectangle(img, (x1 + r, y1), (x2 - r, y2), color, -1, cv2.LINE_AA)
cv2.rectangle(img, (x1, y1 + r), (x2, y2 - r - d), color, -1, cv2.LINE_AA)
cv2.circle(img, (x1 +r, y1+r), 2, color, 12)
cv2.circle(img, (x2 -r, y1+r), 2, color, 12)
cv2.circle(img, (x1 +r, y2-r), 2, color, 12)
cv2.circle(img, (x2 -r, y2-r), 2, color, 12)
return img
def UI_box(x, img, color=None, label=None, line_thickness=None):
# Plots one bounding box on image img
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
img = draw_border(img, (c1[0], c1[1] - t_size[1] -3), (c1[0] + t_size[0], c1[1]+3), color, 1, 8, 2)
cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
def intersect(A,B,C,D):
return ccw(A,C,D) != ccw(B,C,D) and ccw(A,B,C) != ccw(A,B,D)
def ccw(A,B,C):
return (C[1]-A[1]) * (B[0]-A[0]) > (B[1]-A[1]) * (C[0]-A[0])
def get_direction(point1, point2):
direction_str = ""
# calculate y axis direction
if point1[1] > point2[1]:
direction_str += "South"
elif point1[1] < point2[1]:
direction_str += "North"
else:
direction_str += ""
# calculate x axis direction
if point1[0] > point2[0]:
direction_str += "East"
elif point1[0] < point2[0]:
direction_str += "West"
else:
direction_str += ""
return direction_str
def draw_boxes(img, bbox, names,object_id, identities=None, offset=(0, 0)):
cv2.line(img, line[0], line[1], (46,162,112), 3)
height, width, _ = img.shape
# remove tracked point from buffer if object is lost
for key in list(data_deque):
if key not in identities:
data_deque.pop(key)
for i, box in enumerate(bbox):
x1, y1, x2, y2 = [int(i) for i in box]
x1 += offset[0]
x2 += offset[0]
y1 += offset[1]
y2 += offset[1]
# code to find center of bottom edge
center = (int((x2+x1)/ 2), int((y2+y2)/2))
# get ID of object
id = int(identities[i]) if identities is not None else 0
# create new buffer for new object
if id not in data_deque:
data_deque[id] = deque(maxlen= 64)
color = compute_color_for_labels(object_id[i])
obj_name = names[object_id[i]]
label = '{}{:d}'.format("", id) + ":"+ '%s' % (obj_name)
# add center to buffer
data_deque[id].appendleft(center)
if len(data_deque[id]) >= 2:
direction = get_direction(data_deque[id][0], data_deque[id][1])
if intersect(data_deque[id][0], data_deque[id][1], line[0], line[1]):
cv2.line(img, line[0], line[1], (255, 255, 255), 3)
if "South" in direction:
if obj_name not in object_counter:
object_counter[obj_name] = 1
else:
object_counter[obj_name] += 1
if "North" in direction:
if obj_name not in object_counter1:
object_counter1[obj_name] = 1
else:
object_counter1[obj_name] += 1
UI_box(box, img, label=label, color=color, line_thickness=2)
# draw trail
for i in range(1, len(data_deque[id])):
# check if on buffer value is none
if data_deque[id][i - 1] is None or data_deque[id][i] is None:
continue
# generate dynamic thickness of trails
thickness = int(np.sqrt(64 / float(i + i)) * 1.5)
# draw trails
cv2.line(img, data_deque[id][i - 1], data_deque[id][i], color, thickness)
#4. Display Count in top right corner
for idx, (key, value) in enumerate(object_counter1.items()):
cnt_str = str(key) + ":" +str(value)
cv2.line(img, (width - 500,25), (width,25), [85,45,255], 40)
cv2.putText(img, f'Number of Vehicles Entering', (width - 500, 35), 0, 1, [225, 255, 255], thickness=2, lineType=cv2.LINE_AA)
cv2.line(img, (width - 150, 65 + (idx*40)), (width, 65 + (idx*40)), [85, 45, 255], 30)
cv2.putText(img, cnt_str, (width - 150, 75 + (idx*40)), 0, 1, [255, 255, 255], thickness = 2, lineType = cv2.LINE_AA)
for idx, (key, value) in enumerate(object_counter.items()):
cnt_str1 = str(key) + ":" +str(value)
cv2.line(img, (20,25), (500,25), [85,45,255], 40)
cv2.putText(img, f'Numbers of Vehicles Leaving', (11, 35), 0, 1, [225, 255, 255], thickness=2, lineType=cv2.LINE_AA)
cv2.line(img, (20,65+ (idx*40)), (127,65+ (idx*40)), [85,45,255], 30)
cv2.putText(img, cnt_str1, (11, 75+ (idx*40)), 0, 1, [225, 255, 255], thickness=2, lineType=cv2.LINE_AA)
return img
class SegmentationPredictor(DetectionPredictor):
def postprocess(self, preds, img, orig_img):
masks = []
# TODO: filter by classes
p = ops.non_max_suppression(preds[0],
self.args.conf,
self.args.iou,
agnostic=self.args.agnostic_nms,
max_det=self.args.max_det,
nm=32)
proto = preds[1][-1]
for i, pred in enumerate(p):
shape = orig_img[i].shape if self.webcam else orig_img.shape
if not len(pred):
continue
if self.args.retina_masks:
pred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], shape).round()
masks.append(ops.process_mask_native(proto[i], pred[:, 6:], pred[:, :4], shape[:2])) # HWC
else:
masks.append(ops.process_mask(proto[i], pred[:, 6:], pred[:, :4], img.shape[2:], upsample=True)) # HWC
pred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], shape).round()
return (p, masks)
def write_results(self, idx, preds, batch):
p, im, im0 = batch
log_string = ""
if len(im.shape) == 3:
im = im[None] # expand for batch dim
self.seen += 1
if self.webcam: # batch_size >= 1
log_string += f'{idx}: '
frame = self.dataset.count
else:
frame = getattr(self.dataset, 'frame', 0)
self.data_path = p
self.txt_path = str(self.save_dir / 'labels' / p.stem) + ('' if self.dataset.mode == 'image' else f'_{frame}')
log_string += '%gx%g ' % im.shape[2:] # print string
self.annotator = self.get_annotator(im0)
preds, masks = preds
det = preds[idx]
if len(det) == 0:
return log_string
# Segments
mask = masks[idx]
if self.args.save_txt:
segments = [
ops.scale_segments(im0.shape if self.args.retina_masks else im.shape[2:], x, im0.shape, normalize=True)
for x in reversed(ops.masks2segments(mask))]
# Print results
for c in det[:, 5].unique():
n = (det[:, 5] == c).sum() # detections per class
log_string += f"{n} {self.model.names[int(c)]}{'s' * (n > 1)}, " # add to string
# Mask plotting
self.annotator.masks(
mask,
colors=[colors(x, True) for x in det[:, 5]],
im_gpu=torch.as_tensor(im0, dtype=torch.float16).to(self.device).permute(2, 0, 1).flip(0).contiguous() /
255 if self.args.retina_masks else im[idx])
det = reversed(det[:, :6])
self.all_outputs.append([det, mask])
xywh_bboxs = []
confs = []
oids = []
outputs = []
# Write results
for j, (*xyxy, conf, cls) in enumerate(reversed(det[:, :6])):
x_c, y_c, bbox_w, bbox_h = xyxy_to_xywh(*xyxy)
xywh_obj = [x_c, y_c, bbox_w, bbox_h]
xywh_bboxs.append(xywh_obj)
confs.append([conf.item()])
oids.append(int(cls))
xywhs = torch.Tensor(xywh_bboxs)
confss = torch.Tensor(confs)
outputs = deepsort.update(xywhs, confss, oids, im0)
if len(outputs) > 0:
bbox_xyxy = outputs[:, :4]
identities = outputs[:, -2]
object_id = outputs[:, -1]
draw_boxes(im0, bbox_xyxy, self.model.names, object_id,identities)
return log_string
@hydra.main(version_base=None, config_path=str(DEFAULT_CONFIG.parent), config_name=DEFAULT_CONFIG.name)
def predict(cfg):
init_tracker()
cfg.model = cfg.model or "yolov8n-seg.pt"
cfg.imgsz = check_imgsz(cfg.imgsz, min_dim=2) # check image size
cfg.source = cfg.source if cfg.source is not None else ROOT / "assets"
predictor = SegmentationPredictor(cfg)
predictor()
if __name__ == "__main__":
predict()
这里给的是对象分割和 DeepSORT 跟踪(ID + 轨迹)和车辆计数
没有分割在detect目录下,自行测试。
测试结果
如有侵权,或需要完整代码,请及时联系博主。